SIMULATION 3D
Gilles Schaefer est le créateur principal des logiciels suivants :
- CALLAS
- PROSPER
- LECOS
- TOUR
Les logiciels sont des éléments structurants de la démarche de conception des véhicules : la conception des véhicules utilise la simulation numérique, mais la conception des logiciels formalise et valide une compréhension de leur fonctionnement.
Simulation de Temps au Tour
TOUR calcul des performances des voitures de compétition, utilisé par Renault Sport, Peugeot Sport, Citroën Sport, ORECA, Snobeck, Nissan Motorsport, etc ; il a notamment orienté le virage de la conception de la Peugeot 905 vers des appuis aérodynamiques importants, au détriment de la vitesse de pointe, plus efficace pour le Championnat du Monde.
Dynamique du Véhicule 3D
CALLAS et PROSPER sont deux logiciels de dynamique du véhicule basés sur 4 idées majeures :
- l’approche 3D est la plus intéressante car les phénomènes verticaux latéraux et longitudinaux ne sont pas indépendants : par exemple le lever de pied en virage est le cas dimensionnant pour de nombreux véhicules en terme de réserve de sousvirage, et il associe les trois dynamiques
- la modélisation fonctionnelle est la plus efficace pour la conception (plonger dans les détails des mécanismes ou de la mécatronique alourdit la démarche de conception)
- la simulation doit être suffisamment facile pour être mise sur le bureau de tout ingénieur concepteur, ce qui implique l’utilisation d’un vocabulaire et des tests métiers, une IHM de haut niveau lui permettant analyse et dialogue (avec interfaçage avec la bureautique)
- la simulation doit « apprendre du réel », d’où la prise en charge des acquisitions embarquées en base de données

Les logiciels CALLAS et PROSPER sont maintenant distribués mondialement par la société AV SIMULATION.
Ci-dessous des vidéos montrant des cas de simulations intéressants.
| Ce test consiste à rouler avec une voiture de tourisme à une vitesse progressivement croissante entre des quilles, ce qui devient de plus en plus difficile ; on remarque le comportement légerement sousvireur au début, puis très survireur avec effet d’appel-contre-appel bien connu en rallye, avec une forte glisse arrière. | |
| Le véhicule MODIX a été développé pour la DGA-ETAS pour être un laboratoire roulant des liaisons au sol d’un 8×8. Chaque roue est doté de possibilité de charge, traction, freinage et braquage indépendants. Un controle commande informatique permet de simuler les différentes configurations imaginées pour les futurs 8×8. Cette vidéo a été présentée à la conférence ISTVS de Ferrara en 1997. | |
| Un travail de recherche sur la stabilité des Poids Lourds articulés Tracteur+semi-remorque à frêt liquide a ét effectué sous financement PREDIT. Le but était de comprendre et proposer des améliorations. Un modèle de simulation pour le véhicule et un autre pour le fret liquide ont été développé, puis couplés selon le principe de la Force Extérieure. Des essais de validation ont été effectués sur véhicule réel. Deux publications en sont issues. | |
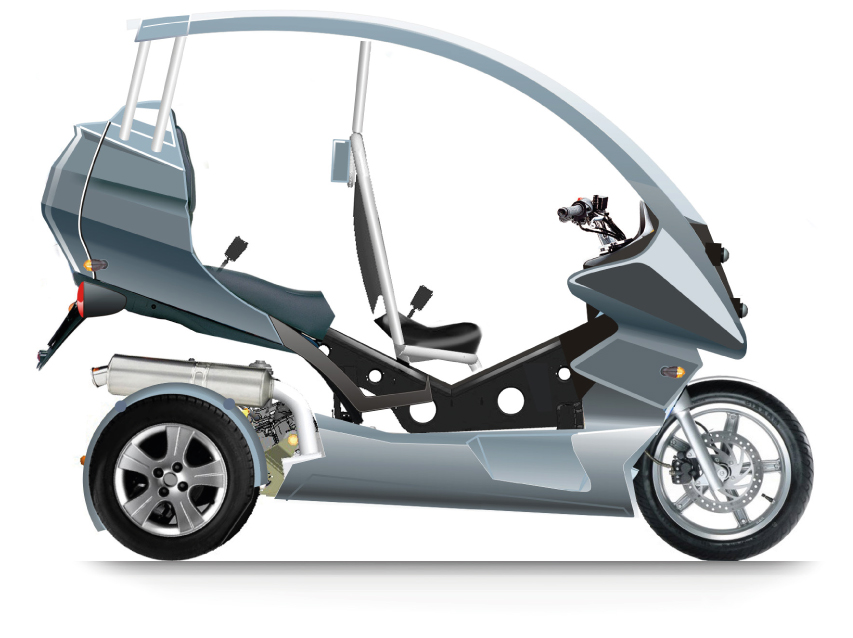
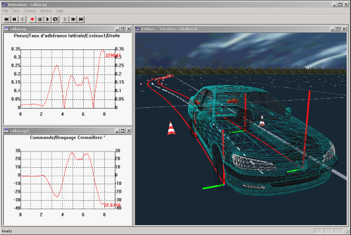
| L’étude du comportement dynamique des motos est assez délicat, car peu stable sans actions correctrices du pilote.
Une autre raison de la moindre connaissance du domaine « 2 roues » comparativement au domaine « 4 Roues » est que l’industrie moto est sensiblement plus petite que celle de l’automobile. Le travail présenté ici vise à quantifier le potentiel de décélération d’une moto selon sa géométrie. En partant de en haut et à droite : compte-tours, rapport engagé sur fond blanc, compteur de vitesse barre de position d’accélérateur, de frein et d’embrayage position du guidon le chiffre rouge en haut à gauche est la valeur instantanée de l’accéléromètre lié à la masse suspendue. Texte avec les valeurs numériques de temps distance vitesse Sur fond gris, les barres donne le taux de sollicitation longi en vert et latéral en rouge du pneu : l’avant n’est pas saturé. |
|
| Le test de la tôle ondulée à longueur d’onde fixe, mais parcourue à vitesse progressivement croissante ; on voit bien la zone calme, la résonance, puis la filtration, avec toutes les non-linéarités (décollement de roue, perte de traction, butée de compression…). | |
| Le convoi tracteur semi-remorque est un banc d’essai de pneumatique d’avion gros porteur, placé au centre de la remorque ; lorsque la roue est braquée progressivement, elle génere une poussée latérale qui perturbe l’équilibre du convoi. |
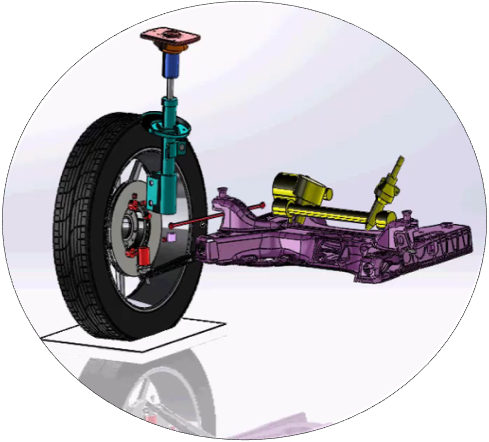
Cinématique
 |
LIS et LECOS sont des logiciels de conception des suspensions dont l’originalité essentielle est d’ajouter à la capacité du calcul direct : passer des points (de suspension) aux courbes cinématiques de la roue en débattement et en braquage, la capacité de back-solving, des caractéristiques souhaitées vers les valeurs libres des coordonnées des points, c’est à dire la possibilité de conception sur spécification fonctionnelle. |